#include <SimRigidBody.h>
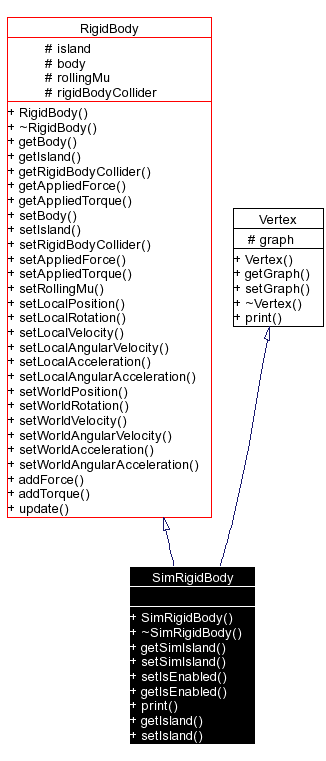
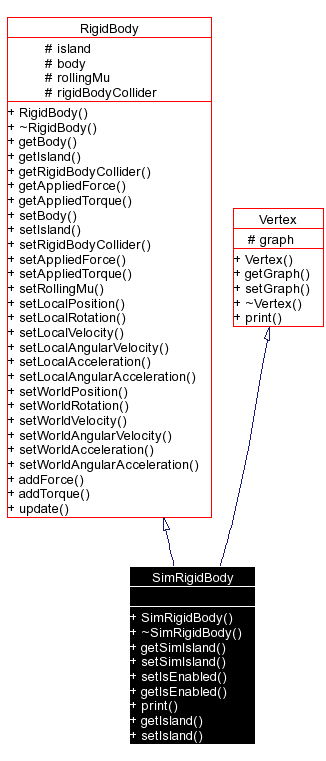
Graphe d'héritage de la classe SimRigidBody
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Redéfinie à partir de Controller. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Implémente Vertex. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Redéfinie à partir de Controller. |
|
|
Redéfinie à partir de RigidBody. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
Redéfinie à partir de MotionController. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.3.3
1.3.3