#include <ServoMotor.h>
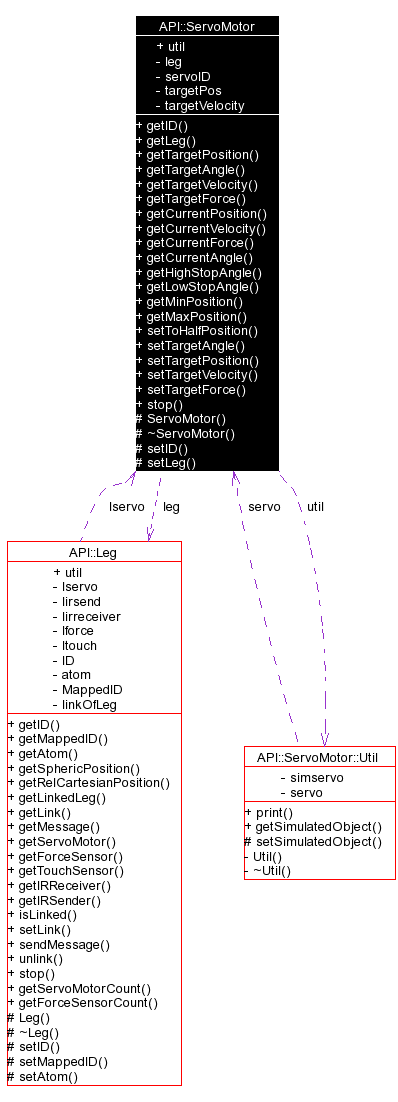
Diagramme de collaboration de API::ServoMotor:
Membres publics | |
| int | getID () const |
| retourne l'identifiant du servo-moteur courant | |
| Leg * | getLeg () const |
| retourne la reference de la patte du servo-moteur courant | |
| int | getTargetPosition () const |
| retourne la position cible du servo-moteur courant | |
| double | getTargetAngle () const |
| retourne l'angle cible du servo-moteur courant | |
| double | getTargetVelocity () const |
| retourne la vitesse cible du servo-moteur courant | |
| double | getTargetForce () const |
| retourne la force cible du servo-moteur courant | |
| int | getCurrentPosition () const |
| retourne la position actuelle du servo-moteur courant | |
| double | getCurrentVelocity () const |
| retourne la vitesse actuelle du servo-moteur courant | |
| double | getCurrentForce () const |
| retourne la force actuelle du servo-moteur courant | |
| double | getCurrentAngle () const |
| retourne l'angle actuel du servo-moteur courant | |
| double | getHighStopAngle () const |
| retourne l'angle minimal du servo-moteur courant | |
| double | getLowStopAngle () const |
| retourne l'angle maximal du servo-moteur courant | |
| int | getMinPosition () const |
| retourne la position minimale du servo-moteur courant | |
| int | getMaxPosition () const |
| retourne la position maximale du servo-moteur courant | |
| void | setToHalfPosition (int mode=KEEP, Real deltaTime=0, unsigned int index=0) |
| Ordonne au servo-moteur de reprendre sa position canonique. | |
| void | setTargetAngle (double aTargetAngle, int mode=KEEP, Real deltaTime=0, unsigned int index=0) |
| Affecte au servo-moteur un angle cible. | |
| void | setTargetPosition (int aTargetPosition, int mode=KEEP, Real deltaTime=0, unsigned int index=0) |
| Affecte au servo-moteur une position cible. | |
| void | setTargetVelocity (int aTargetVelocity, int mode=KEEP, Real deltaTime=0, unsigned int index=0) |
| Affecte au servo-moteur une vitesse cible. | |
| void | setTargetForce (double aTargetForce, int mode=KEEP, Real deltaTime=0, unsigned int index=0) |
| Affecte au servo-moteur une force cible. | |
| void | stop () |
| procede a l'arret du servo-moteur | |
Attributs Publics | |
| Util * | util |
| Reference de l'instance de la classe specifique a la simulation d'un servo-moteur. | |
Membres protégés | |
| ServoMotor () | |
| constructeur du servo-moteur | |
| ~ServoMotor () | |
| destructeur du servo-moteur | |
| void | setID (int aServoMotorID) |
| affecte l'identifiant du servo-moteur courant | |
| void | setLeg (Leg *aLeg) |
| affecte la patte proprietaire du servo-moteur courant | |
|
|
constructeur du servo-moteur
|
|
|
destructeur du servo-moteur
|
|
|
retourne l'angle actuel du servo-moteur courant
|
|
|
retourne la force actuelle du servo-moteur courant
|
|
|
retourne la position actuelle du servo-moteur courant
|
|
|
retourne la vitesse actuelle du servo-moteur courant
|
|
|
retourne l'angle minimal du servo-moteur courant
|
|
|
retourne l'identifiant du servo-moteur courant
|
|
|
retourne la reference de la patte du servo-moteur courant
|
|
|
retourne l'angle maximal du servo-moteur courant
|
|
|
retourne la position maximale du servo-moteur courant
|
|
|
retourne la position minimale du servo-moteur courant
|
|
|
retourne l'angle cible du servo-moteur courant
|
|
|
retourne la force cible du servo-moteur courant
|
|
|
retourne la position cible du servo-moteur courant
|
|
|
retourne la vitesse cible du servo-moteur courant
|
|
|
affecte l'identifiant du servo-moteur courant
|
|
|
affecte la patte proprietaire du servo-moteur courant
|
|
||||||||||||||||||||
|
Affecte au servo-moteur un angle cible.
|
|
||||||||||||||||||||
|
Affecte au servo-moteur une force cible.
|
|
||||||||||||||||||||
|
Affecte au servo-moteur une position cible.
|
|
||||||||||||||||||||
|
Affecte au servo-moteur une vitesse cible.
|
|
||||||||||||||||
|
Ordonne au servo-moteur de reprendre sa position canonique.
|
|
|
procede a l'arret du servo-moteur
|
|
|
|
|
|
|
|
|
|
|
|
Reference de l'instance de la classe specifique a la simulation d'un servo-moteur.
|
 1.3.3
1.3.3