#include <Leg.h>
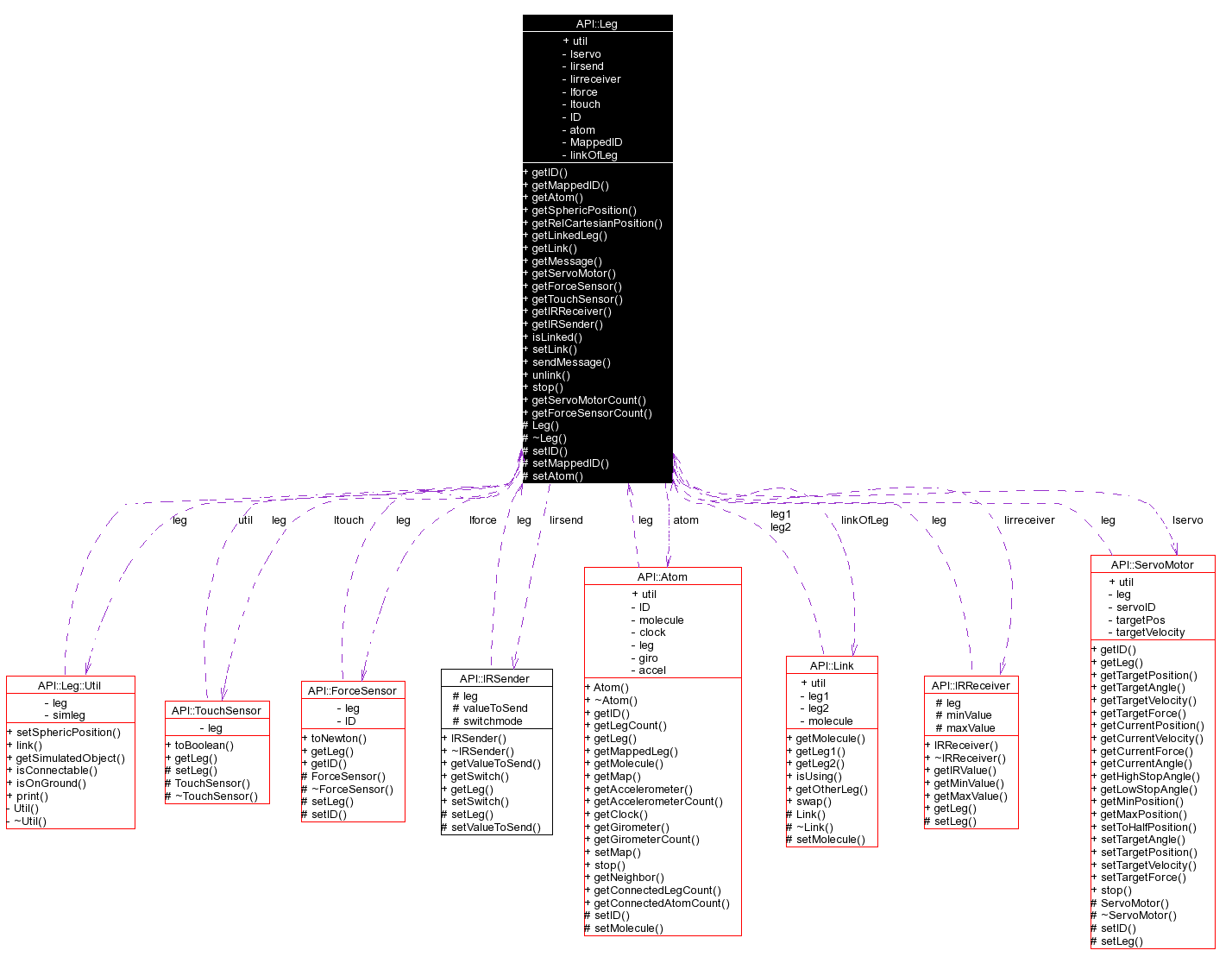
Diagramme de collaboration de API::Leg:
Membres publics | |
| int | getID () const |
| Retourne l'identifiant de la patte courante. | |
| int | getMappedID () const |
| Retourne le numero logique de la patte courante. | |
| Atom * | getAtom () const |
| Retourne la reference de l'atome de la patte courante. | |
| SphericPosition & | getSphericPosition () const |
| Retourne la position spherique de la patte courante. | |
| CartesianPosition & | getRelCartesianPosition () const |
| Retourne la position cartesienne de l'extremite de la patte courante par rapport au centre de l'atome. | |
| Leg * | getLinkedLeg () |
| Retourne la reference de la patte liee a la patte courante. | |
| Link * | getLink () const |
| Retourne la reference de la connexion a laquelle participe la patte courante. | |
| std::string | getMessage () |
| Retourne le premier message disponible de la patte courante. | |
| ServoMotor * | getServoMotor (unsigned int aServoMotorID) const |
| Retourne la reference du servomoteur donne en parametre de la patte courante. | |
| ForceSensor * | getForceSensor (unsigned int aForceSensorID) const |
| Retourne la reference du capteur d'efforts donne en parametre de la patte courante. | |
| TouchSensor * | getTouchSensor () const |
| Retourne la reference du capteur de contact de la patte courante. | |
| IRReceiver * | getIRReceiver () const |
| Retourne la reference du recepteur IR de la patte courante. | |
| IRSender * | getIRSender () const |
| Retourne la reference de l'emetteur IR de la patte courante. | |
| bool | isLinked () const |
| Retourne si la patte est connectee. | |
| void | setLink (Leg *aLeg) |
| Prise en compte d'une connexion passive d'une patte passee en parametre avec la patte courante. | |
| void | sendMessage (std::string aMessage) |
| Envoi d'un message passe en parametre a la patte connectee a la patte courante. | |
| void | unlink () |
| Procede a la deconnexion passive de la patte courante. | |
| void | stop () |
| Procede a l'arret des mouvements de la patte courante. | |
| unsigned int | getServoMotorCount () const |
| Retourne le nombre de servo moteurs de la patte courante. | |
| unsigned int | getForceSensorCount () const |
| Retourne le nombre de capteurs d'efforts de la patte courante. | |
Attributs Publics | |
| Util * | util |
| Reference de l'instance de la classe specifique a la simulation d'une patte. | |
Membres protégés | |
| Leg (Atom *anAtom, int LegID) | |
| Constructeur d'une patte. | |
| virtual | ~Leg () |
| Destructeur d'une patte. | |
| void | setID (int aLegID) |
| affecte l'identifiant de la patte courante | |
| void | setMappedID (int aMappedID) |
| affecte le numero logique de la patte courante | |
| void | setAtom (Atom *anAtom) |
| affecte l'atome proprietaire de la patte courante | |
|
||||||||||||
|
Constructeur d'une patte.
|
|
|
Destructeur d'une patte.
|
|
|
Retourne la reference de l'atome de la patte courante.
|
|
|
Retourne la reference du capteur d'efforts donne en parametre de la patte courante.
|
|
|
Retourne le nombre de capteurs d'efforts de la patte courante.
|
|
|
Retourne l'identifiant de la patte courante.
|
|
|
Retourne la reference du recepteur IR de la patte courante.
|
|
|
Retourne la reference de l'emetteur IR de la patte courante.
|
|
|
Retourne la reference de la connexion a laquelle participe la patte courante.
|
|
|
Retourne la reference de la patte liee a la patte courante.
|
|
|
Retourne le numero logique de la patte courante.
|
|
|
Retourne le premier message disponible de la patte courante.
|
|
|
Retourne la position cartesienne de l'extremite de la patte courante par rapport au centre de l'atome.
|
|
|
Retourne la reference du servomoteur donne en parametre de la patte courante.
|
|
|
Retourne le nombre de servo moteurs de la patte courante.
|
|
|
Retourne la position spherique de la patte courante.
|
|
|
Retourne la reference du capteur de contact de la patte courante.
|
|
|
Retourne si la patte est connectee.
|
|
|
Envoi d'un message passe en parametre a la patte connectee a la patte courante.
|
|
|
affecte l'atome proprietaire de la patte courante
|
|
|
affecte l'identifiant de la patte courante
|
|
|
Prise en compte d'une connexion passive d'une patte passee en parametre avec la patte courante.
|
|
|
affecte le numero logique de la patte courante
|
|
|
Procede a l'arret des mouvements de la patte courante.
|
|
|
Procede a la deconnexion passive de la patte courante.
|
|
|
|
|
|
|
|
|
|
|
|
Reference de l'instance de la classe specifique a la simulation d'une patte.
|
 1.3.3
1.3.3